哈佛大學的研究人員近期開發了一種全新的3D列印技術,該技術能夠直接列印出具備「編程式運動能力」的仿生肌肉纖維,這為機器人在柔性運動方面實現更接近人類的表現奠定了關鍵的基礎。業界普遍認為,此項成就有望徹底改變軟體機器人、醫療器材及智慧結構的設計理念。
長期以來,工程界已為機器人打造出類似骨骼、神經和感覺系統的結構,但「肌肉」一直是最難模擬的一環。 傳統機器人主要依賴馬達、液壓和氣動系統驅動,雖然動作精準有力,卻往往結構剛性大、機構複雜、姿態不夠優雅,很難實現類似人體那樣流暢、柔軟又可精細控制的運動。 先前,研究人員曾嘗試以氣動人工肌肉、熱敏合金、電響應聚合物、磁性材料以及仿人體肌腱的拉索系統等實現軟體驅動,但往往需配套笨重的外部壓縮機、高電壓裝置或複雜機構,難以同時兼顧輕量化、響應速度與複雜形態製造。
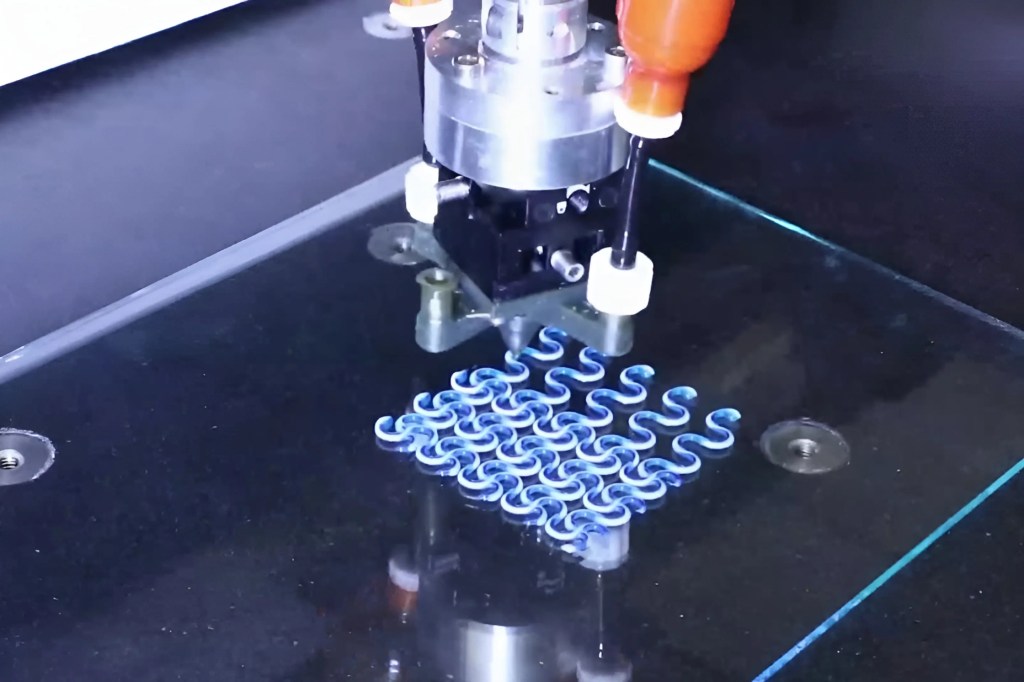
這次哈佛約翰·A·保爾森工程與應用科學學院團隊提出的新方法,則試圖從材料層面「內建」運動邏輯。 研究人員利用3D列印技術,將兩類軟性材料精確並列列印成細長的仿生「肌肉」纖維:一類為遇熱會改變形狀的液晶彈性體「主動材料」,另一類為抵抗形變的「被動彈性體」材料。 列印過程中,透過讓噴嘴旋轉,團隊在微觀尺度上寫入了螺旋狀的分子取向模式,從而精細控制不同區域的反應行為。
在加熱條件下,「主動」液晶彈性體會沿著特定分子排列方向發生收縮,而與之緊密相連的「被動」材料則對這種收縮形成阻抗,其結果是整根纖維會產生彎曲、扭轉、捲曲甚至盤繞等複雜形變。 透過改變兩種材料的排布方式及噴嘴的旋轉參數,研究人員可以在單根纖維內預設不同的變形軌跡,使其在受熱時按預定方式伸展、收縮、螺旋纏繞或展開,無需額外齒輪、剛性關節或後期裝配機構。
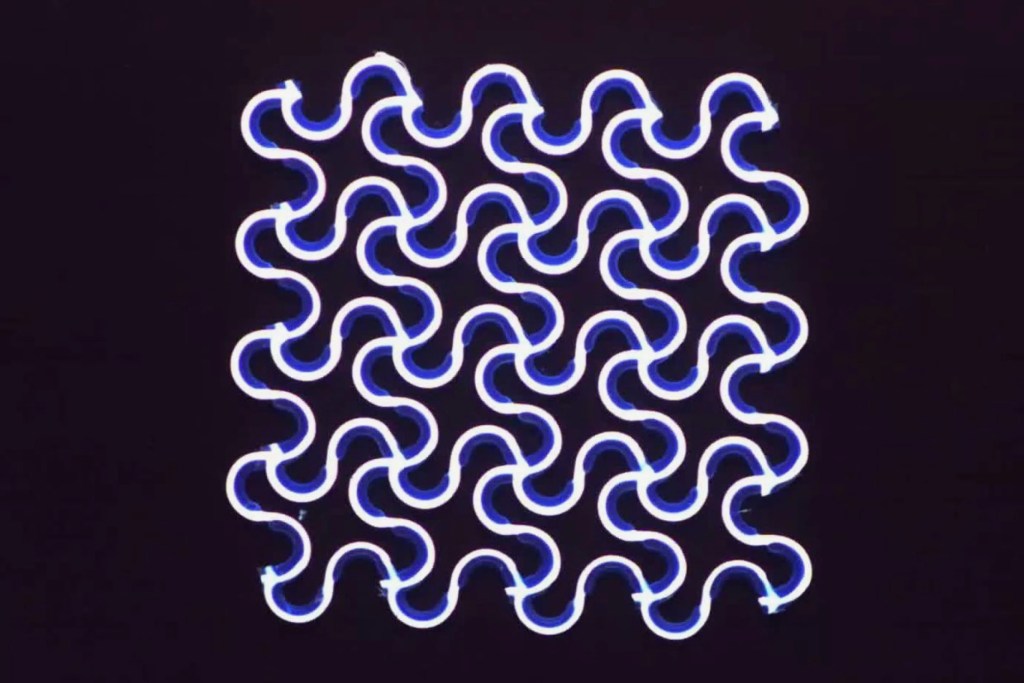
在實驗展示中,團隊列印了多種軟性晶格結構和波浪狀纖維,並透過加熱觀察其各自獨特的形變方式。 有的結構在升溫後體積明顯膨脹,有的則整體收縮;平面的晶格在受熱後可隆起成穹頂狀曲面,展示出顯著的三維形變能力。 研究人員也利用這類材料製作了軟體抓取器,能夠在靠近物體時下落包覆、隨後收緊完成抓取,再在溫度變化下鬆開釋放,實現類似人手的柔性抓取過程。
根據研究團隊介紹,這項技術未來可望應用於自適應軟體機械手、主動濾波與調節結構、生物醫學裝置、溫度反應構件以及可變形機器人系統等領域。 與傳統驅動方式相比,此方法與3D列印製程高度相容,有利於製造複雜且高度客製化的內部結構,使得先前難以透過常規執行器實現的幾何與運動組合成為可能。
目前系統仍存在明顯的限制。當前,纖維的活化主要依賴於熱刺激,這在響應速度和能效方面使其尚難以與成熟的馬達系統相比較,且整體輸出能力不足以在高功率場景中完全取代傳統機器人執行機構。研究人員指出,相關的材料和結構設計仍處於實驗階段,未來需要在刺激方式、耐久性及能量利用效率等方面進行持續優化,才能真正邁向工程和商用應用。








